Integrating tactile feedback for lump localization in Robot-assisted Minimally Invasive Surgery (RMIS) represents an open research issue, which is still far to be solved. Main reasons for this are related e.g. to the need for a transparent connection with the teleoperating console, and an intuitive decoding of the delivered information.
Our focus is on the specific case of RMIS treatment of uterine leiomyomas or fibroids, where little has been done in haptics to improve the outcomes of robotics-enabled palpation tasks.
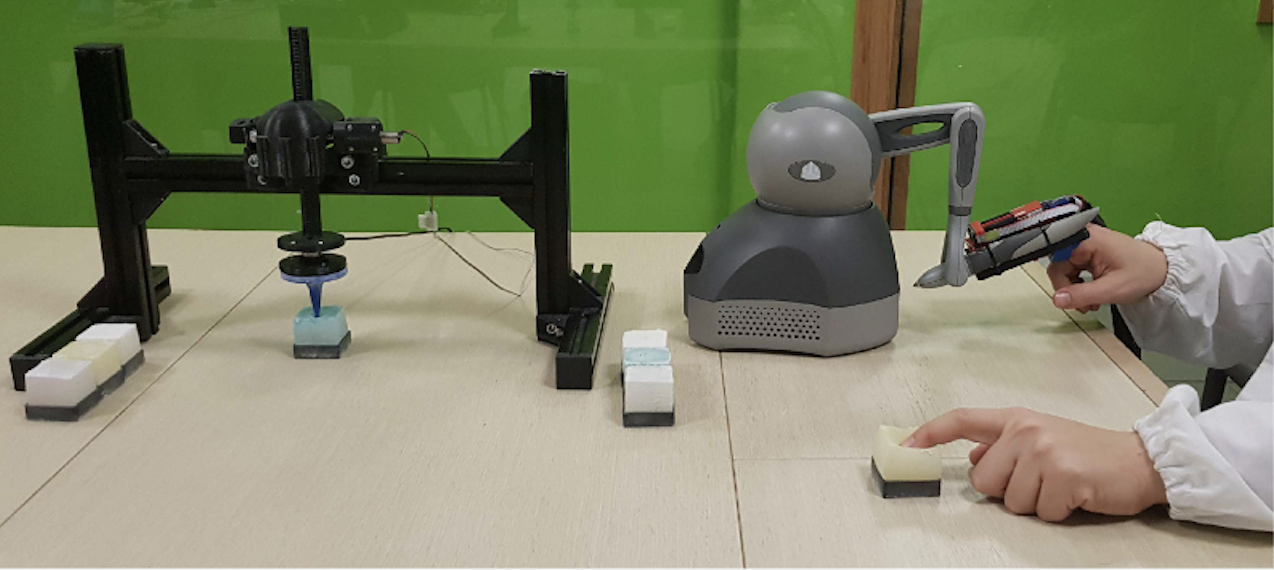
We propose the usage of a wearable haptic interface for softness rendering as a lump display. The device is integrated in a teleoperation architecture that simulates a robot-assisted surgical palpation task of leiomyomas.
We moved from an ex-vivo sample characterization of uterine tissues to show the effectiveness of our interface in conveying meaningful softness information. We proved that our system enables a softness-based discrimination of the embedded fibroids comparable to the one that physicians would achieve using
directly their fingers in palpation tasks (activity in collaboration with Prof. Giannini and Prof. Simoncini).
Research lines