In the FoReLab laboratory of the DII, a team of robots for environmental monitoring and protection is being developed. They are guided by artificial intelligence
They walk, crawl, swim and fly. Guided by Artificial Intelligence, they are able to support human operators in monitoring and protecting different natural environments. The team of environmental robots is located in Pisa, in the FoReLab laboratory of the Department of Information Engineering, dedicated to research for industry 5.0, a new paradigm in which the protection of man and the environment takes on an increasingly relevant aspect.
The team of robots includes ANYmal, a quadruped robot for terrestrial monitoring, the underwater drones Zeno and Kudos, and a team of aerial drones. Together, they are able to collect data from different types of ecosystems on land, in the air and in fresh and salt water.
Image

“Inside the Forelab - explains Giovanni Stea, professor of computer engineering at DII and coordinator of the laboratory - different fields of research are integrated to develop so-called “human-centered” technologies, which have the person and their needs at the center, already in the design phase. Robotics also follows this paradigm shift, designing robots capable of moving in natural environments to support humans in the essential activity of environmental protection, and also putting different robots capable of exchanging information on the different monitored environments, in order to arrive at a truly complete data collection”.
Image

The ANYmal robot is part of the “Natural Intelligence for Robotic Monitoring of Habitats” project, funded by the European Union, which aims to restore and preserve ecosystems through monitoring with robots capable of moving agilely in different environments. The robot is equipped with four cameras that can create three-dimensional images, a locomotion system that allows it to maintain stability on uneven and steep terrain, and an intelligence that comes from both the design of its body and the algorithms that make up its “mind”.
The ecosystems monitored by ANYmal are part of “Natura 2000”, a European network that includes almost thirty thousand environments throughout Europe. The robot had to face several challenges related to the variability and unpredictability of natural spaces, such as uneven and rugged terrain, long-lasting operations, and unexpected collisions, carrying out an initial data collection on four key environments in Italy: forests, meadows, dunes, and Alpine scree. In addition to the cameras that allow real-time vision, the robot is also equipped with an artificial intelligence system that allows the recognition of different types of plants during its mission.
The robot's latest feat, after the Umbrian meadows of Valsorda, the forests of Vallombrosa and the screes of the Stelvio National Park, were the dunes of Asinara and Maddalena.
Image
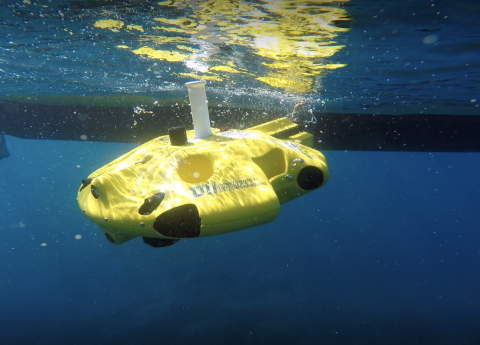
Zeno and Kudos are underwater robots, equipped with cameras and sonar. They monitor the state of the sea and lake bottoms using acoustic waves, communicating with each other to independently carry out missions in an environment that is often difficult for human operators. Zeno is currently employed in various missions with Greenpeace for the protection of marine protected areas, and with various local institutions for the monitoring of fresh and salt water. Zeno is able to carry out missions autonomously, interacting on the surface with other drones or operators on land.
The FoReLab underwater robots are used in particular for monitoring the Posidonia Oceanica meadows, a plant that is essential for the health of the sea, and constantly threatened by human activities, including for example trawling.
Image

The aerial robotics team is composed of drones with high functional and decision-making autonomy, such as Alfio (Autonomous Low Flying Intelligent Object). Also using systems based on artificial intelligence, researchers are equipping FoReLab drones to carry out exploration, surveillance, research and support missions for operations at sea and on land, also in close cooperation and synergy with other vehicles. For example, researchers are studying a combination of vision and AI for precision landings on charging platforms and the automatic selection of safe landing sites in case of emergency.
The final goal is to create systems capable of making decisions autonomously in unpredictable environments such as natural ones, dealing with obstacles such as changes to the mission, management of energy reserves and emergencies, up to the self-organized division of tasks in fleets of heterogeneous vehicles.
In addition to increasing autonomy, new methodologies are being studied to support pilots involved in the use of aerial or terrestrial robots for the exploration of unknown environments, which concern both new systems of environmental perception and innovative piloting systems based on augmented reality. Finally, a drone equipped with a hyperspectral camera is able to acquire different environmental data, training its artificial intelligence for example to recognize the state of different plants.
